
Feedforward Rear Wheel Steering Control
3-wheeler with linear tire model
To find out if a 3-wheeler (tadpole shape) can be designed to be dynamically similar to a 4-wheeler, a linear model is created to investigate the equation of motion and simulate.
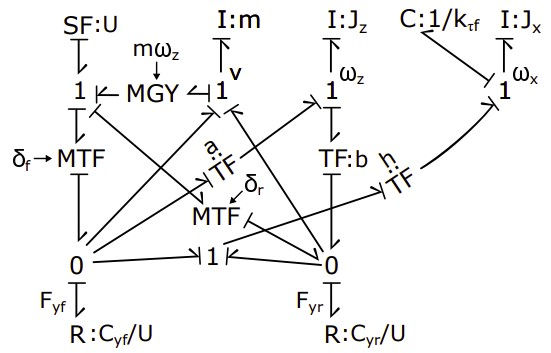
The equation of motion can be derived by the following:
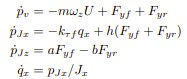
Where
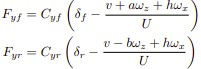
The major difference between the 3-wheeler and the 4-wheeler is that the 3-wheeler is lack of roll stiffness at the rear due to there's no anti-sway bar, which eventaully casue the 3-wheeler to have a bigger roll angle (less comfort & less stable) when having the same yaw rate. The idea is to use rear wheel steeing input del_r to mimic a rear roll stiffness, such that:
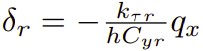
Then the equation of motion for roll dynamics becomes to:

Where C_yr is the faked rear roll stiffness.
Such a model is then simulated using MATLAB/Simulink and the step responses are as follows:

Unfortunately, such an idea does not help with roll angle reduction as you can tell for the roll dynamic step response that the rear steering result is obviously higher than the passive models.